





Ученые Томского университета систем управления и радиоэлектроники (ТУСУР) ведут разработку неинвазивного нейроинтерфейса для управления протезами: датчики этого устройства крепятся к голове пациента и считывают сигналы мозга.
Об этом сообщил Инновационный портал Томской области. Сейчас при конструкции управляемых протезов обычно используют миодатчики на концевых мышцах культи, и сигналов от этих датчиков недостаточно для полноценного управления. В некоторых редких случаях вживляют в мозг инвазивные нейродатчики, но это требует хирургической операции и несет риск осложнений типа эпилепсии.
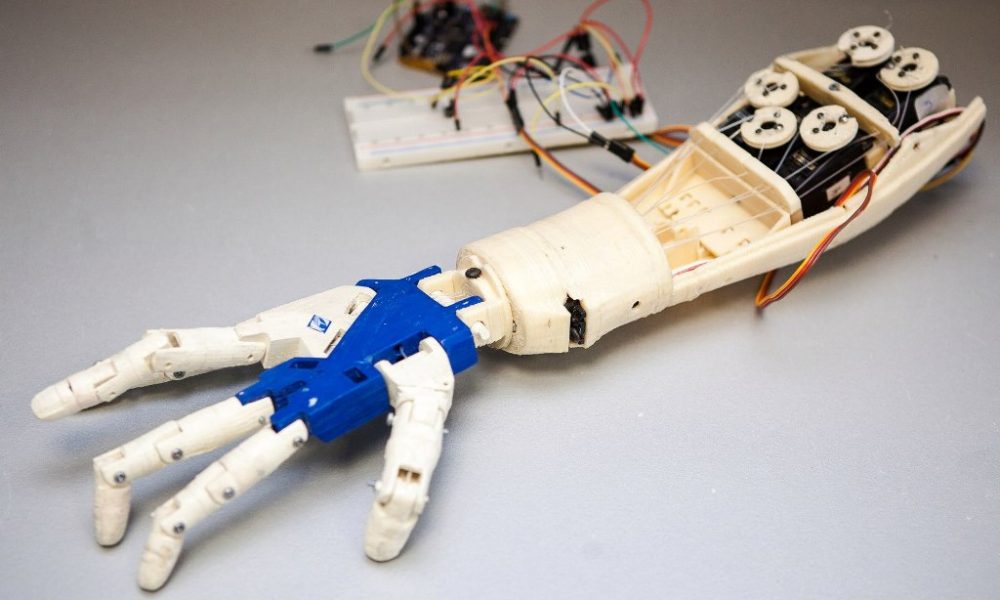
Нейроинтерфейс, который разрабатывают специалисты ТУСУРа, закрепляется на голове неинвазивно и считывает сигналы мозга. Протез руки для экспериментов разработчики распечатали на 3D-принтере.
Совместно с учеными Сибирского государственного медицинского университета идет создание базы паттернов положений кисти, то есть устойчивых положений. По словам руководителя STEM-центра ТУСУРа Юлии Лободы, за основу взяли базу паттернов из восьми положений.
Текущая задача разработчиков — смоделировать переходы из одного положения в другое и создать базу уже не статичных, а динамичных положений. Она позволит решать с помощью протеза более сложные двигательные задачи, к примеру, точно захватывать предмет.
По оценкам специалистов, для распознавания сигналов мозга конкретного человека и соединения их с базой положений уйдет около двух недель. Для сравнения, сейчас для освоения протезов может уйти до нескольких лет.
Планируется завершить разработку нейроинтерфейса через год.
The post В Томске разрабатывают внешний нейроинтерфейс для управления протезами appeared first on РИА АМИ.
Powered by WPeMatico